

selected here representing a wide range of wave and beach conditions (Cases
1, 3, 4, and 7). Kraus and Larson (1991) summarized the experimental
arrangement and conditions, measured wave height, mean water level, and
longshore current used in the comparisons. For reference, the wave
conditions in the horizontal portion of the basin during the experimental cases
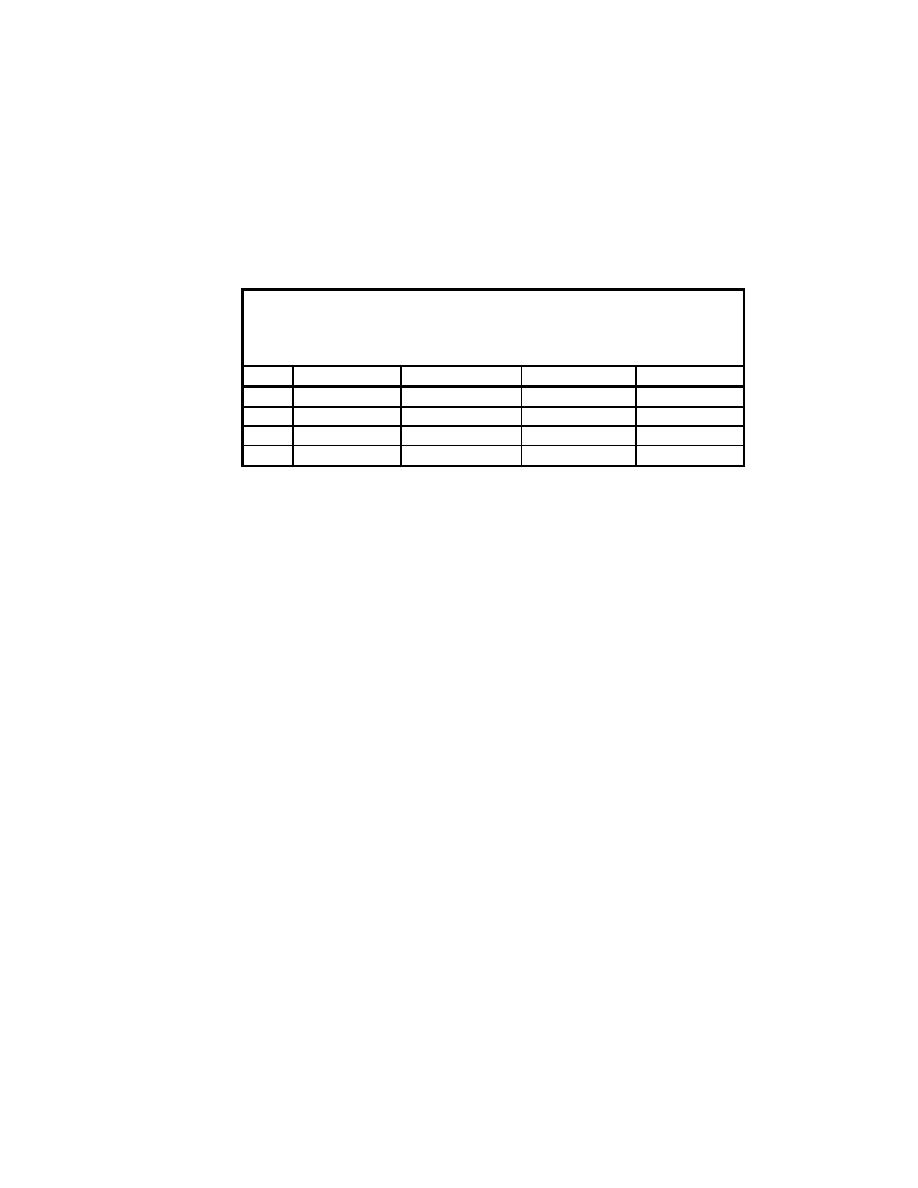
studied are listed in Table 4. In summary, Case 1 encompassed large incident
wave angles and smooth bottom; Case 3, large wave heights and smooth
bottom; Case 4, an average wave condition and smooth bottom; and Case 7,
an average wave condition and rough bottom.
Table 4
Wave Conditions in the Horizontal Portion of Basin for
Selected Cases from Visser (1982) Experiments Represented
by NMLong-CW Simulations
Case
Wave Height (m)
Wave Period (s)
Wave Angle (deg)
Beach Slope (-)
1
0.072
2.01
31.1
0.101
3
0.089
1.00
15.4
0.101
4
0.078
1.02
15.4
0.050
7
0.078
1.02
15.4
0.050
Because Visser's experiments were run with monochromatic waves, not
involving the additional complexity of random waves breaking at different
locations across the profile, it is an excellent data set to evaluate model
performance with respect to features such as the wave-current interaction and
the roller model. Kraus and Larson (1991) investigated both a linear and
nonlinear friction formulation in the longshore momentum equation, but in
this study only the nonlinear model is employed (Equation 38). The
coefficients in the wave transformation model were fixed to standard values
(κ = 0.15, and Γ = 0.4), whereas γb was set to the value measured by Visser
(1982) to eliminate an additional model parameter (compare Larson and
Kraus 1991). Thus, the two main parameters entering the calibration were cf
(Equation 38) and Λ (Equation 35). These two parameters were also
optimized by Kraus and Larson (1991), who found the following range of
0.15-0.50.
First, calculations were performed with NMLong-CW with and without
the roller model to assess inclusion of the momentum transport associated
with the roller on the longshore current and mean water level. In previous
attempts to simulate the Visser data, as well as other data sets of similar type,
it has been noted that there can be a pronounced shoreward shift in the peak
of the current and wave setdown in the measurements as compared to
calculations. This shift might be eliminated or reduced by including the
roller model. In the simulations discussed here, unless otherwise stated,
standard roller parameter values as recommended by Dally and Brown (1995)
were employed, that is, βR = 1.0 and βD = 0.1.
Figures 19-29 summarize the results from NMLong-CW simulations by
showing comparisons between measurements and calculations for longshore
current, mean water level, and wave height for each of the four cases. The
emphasis in the comparisons is on the current and water level, and the wave
height is shown for completeness, although the calculations results are
45
Chapter 6 Verification of Longshore Current Model

 Previous Page
Previous Page
