

the entire survey period
showed a maximum vertical
deviation of 1.8 cm and a
minimum deviation of 0.07
cm.
Topography
RTK-GPS has quickly
gained acceptance as a
leading tool for ground-
based 2D and 3D beach
(Morton et al. 1993) and
nearshore (Wong, et al.
2000) mapping applications
and is the foundation of
Geodynamics'
Shoreline
and Nearshore Digital
Mapping and Analysis
Program
(SANDMAP).
Geodetic GPS systems have
been employed in 2D beach
mapping studies for several
years,
including
the
collection of the traditional
beach profile. However, a
more
advanced
2D
application of GPS is the
introduction of a vehicle-
assisted instrument platform
for the collection of
accurate
datum-derived
shorelines or elevation
contours by the U.S.
Geologic Survey and others
(List and Farris 1999;
Freeman et al. 2003;
Bernstein et al. 2004;
Ruggiero, Kaminsky, and
Gelfenbaum 2004).
A
modification of this vehicle-
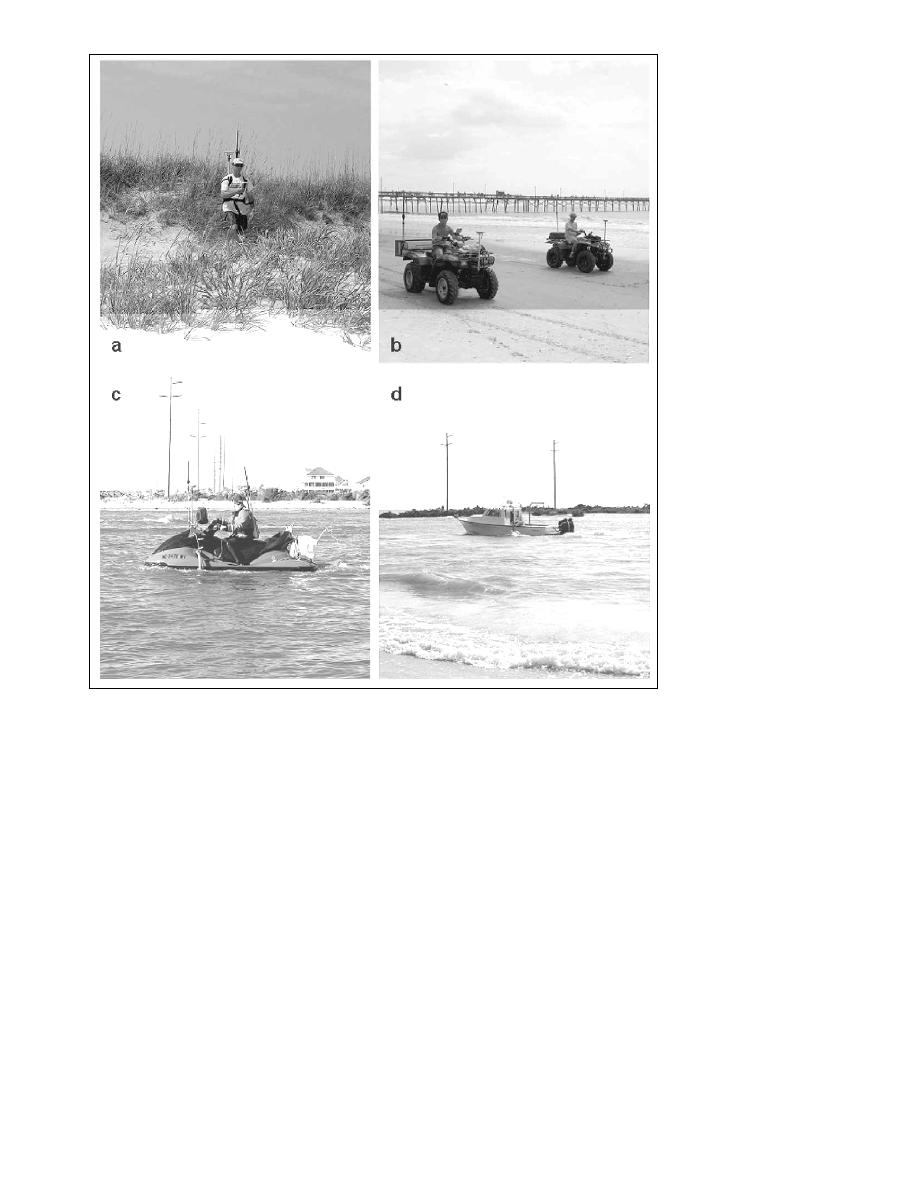
Figure 2. (a) Topographic mapping of dunes and inaccessible areas with the RTK-GPS rover based
method is the
backpack system, (b) topographic mapping of the subaerial beach from the dune-base to the low-tide application of geodetic GPS
region with RTK-GPS mounted on all-terrain vehicles, (c) singlebeam bathymetric mapping of the to acquire both 2D datum-
Hatteras breach with the Surfzone Explorer, and (d) multibeam bathymetric mapping of the Hatteras
based shorelines and 3D
breach with the RV 4-points.
topographic
data
simultaneously by inclusion of an all terrain vehicle (ATV) and
accomplish this goal, several flexible and highly mobile backpack mounted system (Bernstein et al. 2003; Freeman et al.
instrument platforms were deployed that utilize real-time 2003, Mitasova et al. 2003).
kinematic (RTK) GPS systems for high-resolution topography
Collection of 2D and 3D topographic data at the site of the
coupled with motion-compensated shallow-water singlebeam
and multibeam sonar technologies for 3D seafloor mapping Hatteras breach applied both vehicle- and backpack-assisted
acquisition techniques (Figure 2a and 2b) using low latency
acquisition (Figure 2).
Trimble 5700 GPS receivers collecting at 10 Hz. The northeast
A detailed GPS site calibration was performed prior to the side of the breach was the only access location and served as the
collection of any survey data at the breach. National Geodetic staging area for both topographic and bathymetric surveys.
Survey (NGS) benchmark designated C193 was recovered along Along this side of the breach, detailed topographic data were
with three North Carolina Department of Transportation acquired with the ATV system. This allowed collection of
(NCDOT) marks in the center of NC12. NGS C193 was the best approximately 11,000 data points over the course of the two
available control that could be found in the hurricane debris and surveys. The inaccessibility of the southwest shoreline and
overwash for establishing the land-based station. Results of the subaerial portions within the middle of the breach required the
site calibration showed an average deviation in the Northing of use of the backpack system. Although this is not the most
4.1 cm, Easting of 1.5 cm and an average of 2.0 cm in the vertical efficient means of collecting 3D elevation data, the portability of
component. To quantify daily environmental and/or operator the backpack system allowed for the collection of over 15,000
error, NCDOT mark PT207 was checked each day prior to the topographic data points along the southwest side of the breach in
collection of field data. Results of daily benchmark checks over less than 7 hr.
4
Shore & Beach Vol. 72, No. 2, Spring 2004, pp. 3 - 7

 Previous Page
Previous Page
