

292
L. Erikson et al. / Coastal Engineering 52 (2005) 285302
processing rectification. A more detailed description
with a captured image resolution of 720 by 576
of the methodology can be found in Erikson and
pixels at 25 frames per second. The sampling
Hanson (2005).
frequency of the capacitance wave gauges was also
set to 25 Hz to match the cameras. The cameras
4.3. Wave generation
were mounted on standard tripods and positioned
approximately 2 m from the sidewall of the tank so
The study presented herein considers idealized
that nominal pixel resolution was better than 2 mm
wave packets representing waves generated by
with a horizontal field of view (FOV) of less than
typical conventional and high-speed large ferries.
1.5 m for each camera. Accurate time synchroniza-
Based on a review of the literature, supplemented
tion between the cameras and the gauge logger was
with field measurements, and Airy wave theory,
not possible due to logistical difficulties. However, a
wave trains where the wave height increases to some
digital clock was displayed in the common camera
maximum and consequently decreases are thought to
FOV to assist in image synchronization. The water
be simplified first-order representations of secondary
was dyed fluorescent green to improve image
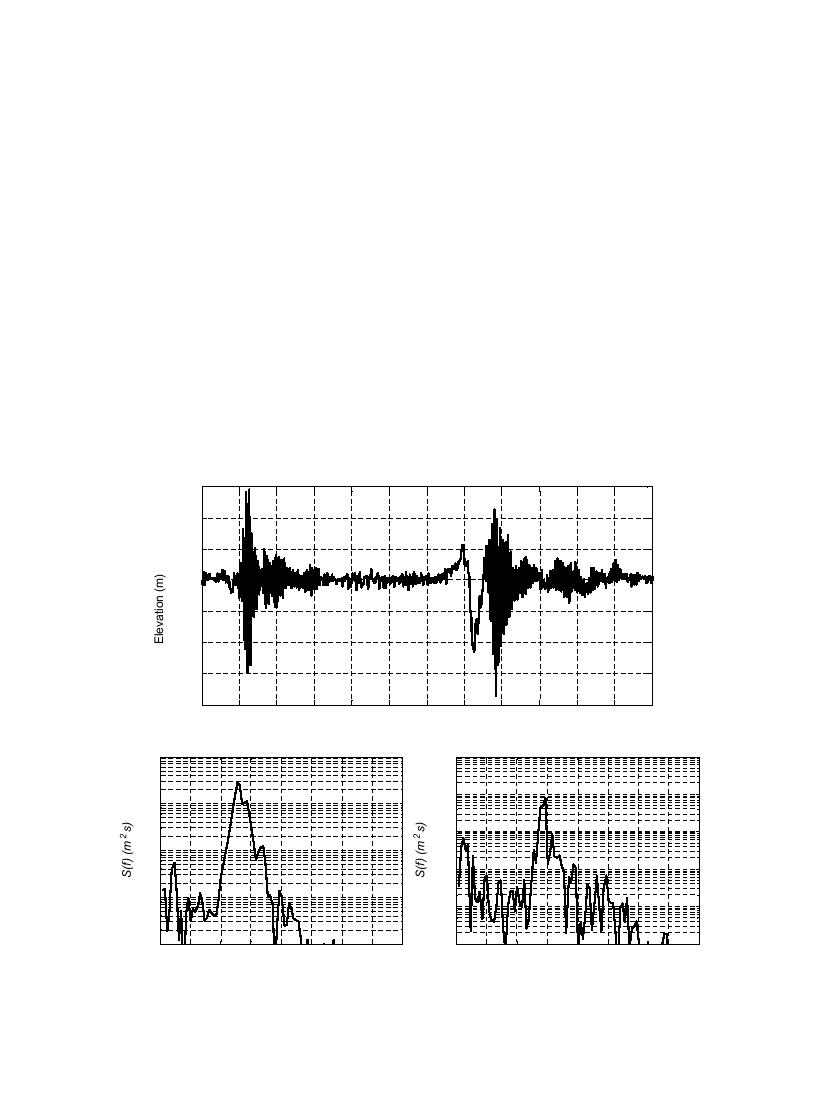
waves generated by moving vessels. As an example,
contrast, and a grid of control points was marked
wave trains measured in the field in deep water
on the outside of the glass tank wall (target plane)
following the passage of two vessels are shown in
with an origin defined at the SWS to allow post-
0.3
0.2
0.1
0
-0.1
-0.2
-0.3
-0.4
0
100
200
300
400
500
600
700
800
900
1000
1100
1200
Time (s)
100
100
10-1
10-1
10-2
10-2
10-3
10-3
10-4
10-4
0
0.05
0.1
0.15
0.2
0.25
0.3
0.35
0.4
0
0.05
0.1
0.15
0.2
0.25
0.3
0.35
0.4
Frequency (Hz)
Frequency (Hz)
Fig. 4. Surface elevations following the passage of two large passenger carrying vessels and the associated energy spectrums.

 Previous Page
Previous Page
